25% de décès pour seulement 2% d’utilisateurs de deux-roues motorisés. Et si l’une des solutions pour limiter ces accidents de la route résidait dans la connectivité entre véhicules ? Dans le cadre de son programme de recherche, la Fondation MAIF a décidé de financer le projet de recherche de UTAC CERAM Millbrook, dont elle vient de publier les résultats. Un projet de recherche qui met en avant le potentiel de la connectivité inter-véhicule pour éviter les accidents, notamment les collisions entre voitures et motos.
La connectivité au service des usagers de la route
« Toujours plus connecté », cette tendance où la data règne n’a pas échappé au secteur automobile, qui ne cesse de développer et de mettre en circulation des véhicules de plus en plus connectés. Une technologie utile, non seulement pour connaître le positionnement et les mouvements de ses usagers mais avant tout pour améliorer leur sécurité sur la route.
Si de plus en plus de véhicules sont équipés de systèmes avancés d’aide à la conduite (ADAS), il reste compliqué de les transposer aux motos. Cela pour des raisons de coût, de stabilité et également de compacité. De plus, la portée de détection de leurs capteurs physiques (caméras, radars) reste limitée. C’est là que la connectivité démontre ses atouts car elle permet d’augmenter le champ de détection autour des véhicules, qui plus est, indépendamment des conditions extérieures.
Aujourd’hui, l’un des enjeux principaux du développement de la connectivité ; en particulier des systèmes de transport intelligent coopératif, dits V2X, qui permettent aux véhicules d’envoyer des informations aux usagers de la route évoluant à proximité ; réside dans l’anticipation du danger.
L’objectif principal de la connectivité auto-moto : permettre aux véhicules de repérer les motos pour éviter de les percuter.
Pour Théo Charbonneau, Responsable Activité Grand Projet ADAS-AD chez UTAC CERAM Millbrook, « Le V2X présente un fort potentiel en termes de sécurité routière pour les motocyclistes. Il réside notamment dans sa capacité à les percevoir dans le flot de la circulation afin d’informer les véhicules et laisser réagir ces derniers, en priorité, qui ont propension à être plus stables sur la route ».
Véhicules et motos connectés = moins de danger ?
Les équipes UTAC CERAM Millbrook ont mis en place un dispositif de connectivité où, grâce à une technologie avancée de communication inter-véhiculaire (boîtiers V2X), une alerte visuelle et sonore est envoyée aux deux conducteurs (voitures et/ou moto) lorsqu’un risque potentiel de collision est enregistré. Ce calcul de probabilité se fait à partir de la position, du déplacement et de la vitesse des deux usagers. Dans un premier temps, le conducteur est simplement averti de la situation à risque et peut réagir instinctivement. Dans un second temps, en cas d’absence de réaction du conducteur, le véhicule freine automatiquement.
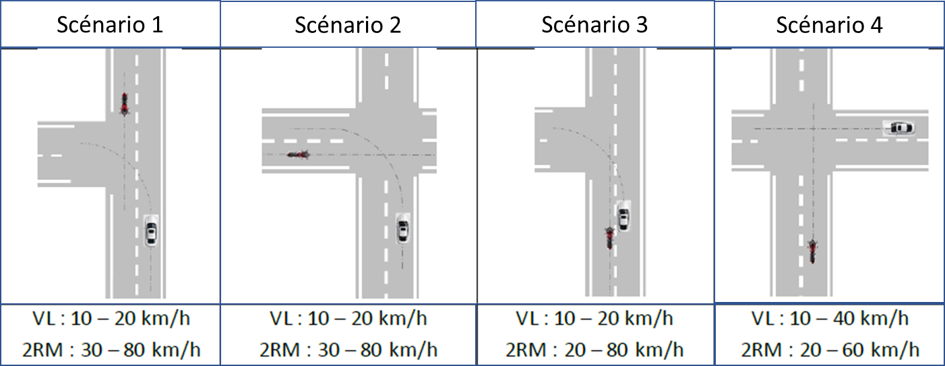
L’efficacité du système a été testée sur quatre scénarios accidentogènes, inspirés de cas réels et les plus fréquents, impliquant une voiture et une moto à un croisement.
Scénario 1 : une voiture s’engage pour tourner, tandis qu’une moto arrive en face, selon une trajectoire rectiligne. Ce scénario est une combinaison de basses vitesses pour la voiture, de 10 à 20 km/h, et de plus hautes vitesses pour la moto, de 30 à 80 km/h.
Scénario 2 : similaire au précédent, seulement la moto arrive depuis la gauche de la voiture, toujours selon une trajectoire rectiligne. Il couvre de 10 et 20 km/h pour la voiture, contre de plus hautes vitesses pour la moto : 30 à 80 km/h.
Scénario 3 : détection de la moto dans l’angle mort de la voiture. En effet, cette dernière s’apprête à tourner à gauche, tandis que la moto arrive à vitesse plus élevée, derrière elle, comme un dépassement, sur sa gauche. Le panel de vitesse de la voiture est identique au scénario précédent, tandis que l’on couvre de 20 à 80 km/h pour la moto.
Scénario 4 : intersection où les deux trajectoires de la voiture et de la moto sont rectilignes. Cette dernière vient de la droite de la voiture. Sa vitesse varie de 20 à 60 km/h, contre 10 à 40 km/h pour la voiture.
L’ensemble de ces scénarios a été réalisé sur le centre d’essais TEQMO dédié aux véhicules automatisés et connectés situé à Linas-Montlhéry, dans un contexte de faible vitesse véhicule et dans un cadre urbain ou de ralentissement péri-urbain. Ils mettent en évidence que le système fonctionne plutôt bien, en respectant ces conditions. Les résultats de l’étude sont ici probants.
Le système V2X, une technologie prometteuse mais à affiner
L’étude menée par UTAC CERAM Millbrook démontre que la connectivité (systèmes V2X) pourrait avoir un rôle à jouer dans la prévention des accidents de la route impliquant les deux-roues motorisés. Encore faut-il y apporter quelques ajustements.
En effet, dans ces quatre cas de mise en situation, les conclusions attestent de la réactivité du système. Un signal est bien envoyé au conducteur, lui permettant de réagir et ainsi d’être en mesure d’éviter la collision. Toutefois, cette alerte n’est pas toujours répétable et est envoyée parfois tardivement, le temps de réaction offert, manuel ou automatique, se trouvant alors trop court. En outre, il convient de considérer l’équilibre plus précaire d’un deux-roues motorisé lors de l’implémentation d’une action automatique, afin de prévenir tout risque de chute.
Par ailleurs, l’efficacité du système repose sur le nombre d’utilisateurs : plus sa communauté d’usagers est large, plus il est efficace et aussi sur son état de fonctionnement (obsolescence, générations…). Cela implique donc de perfectionner et de déployer ces systèmes à l’ensemble des usagers de la route.
Enfin, la fiabilité du GPS est essentielle pour localiser parfaitement les usagers et calculer les risques potentiels de collision. Il est alors nécessaire de s’assurer de l’homogénéité dans les performances des systèmes de positionnement que les utilisateurs utilisent.
Pour Jean-Marc Truffet, Responsable communication et des projets Fondation MAIF, « Les nouvelles technologies embarquées sont de plus en plus performantes et permettent, dans certaines situations critiques, d’augmenter les capacités humaines. Ce qui ne prive pas tous les conducteurs, de moto et de 4 roues, de rester vigilants et prudents car la technologie est une aide, pas un palliatif. »
CONCLUSION
L’étude permet d’affirmer, aujourd’hui, que les technologies sont prêtes et pourraient être réellement bénéfiques aux usagers des deux-roues motorisés. En effet, les 4 scénarios étudiés couvrent 35% des motocyclistes blessés lors d’un accident avec une voiture et 27% des tués. Toutefois, des paramètres techniques et stratégiques sont encore à prendre en compte et à perfectionner. Tout comme, la nécessité d’un regroupement des acteurs du secteur auto et moto autour de cette technologie de connectivité pour développer et améliorer communément le système V2X. L’organisme Euro NCAP a prévu, d’ici 2025, des essais d’évaluation de systèmes V2X, soit seuls, soit combinés à des ADAS. En outre, UTAC CERAM Millbrook poursuit sa R&D dans le V2X, notamment au travers du projet SECUR, lancé en décembre 2020, avec le concours de l’ensemble de l’écosystème V2X.